


BMS means different things to different people. To some it is simply Battery Monitoring, keeping a check on the key operational parameters during charging and discharging such as voltages and currents and the battery internal and ambient temperature. The monitoring circuits would normally provide inputs to protection devices which would generate alarms or disconnect the battery from the load or charger should any of the parameters become out of limits.
For the power or plant engineer responsible for standby power who's battery is the last line of defence against a power blackout or a telecommunications network outage BMS means Battery Management Systems. Such systems encompass not only the monitoring and protection of the battery but also methods for keeping it ready to deliver full power when called upon and methods for prolonging its life. This includes everything from controlling the charging regime to planned maintenance.
For the automotive engineer the Battery Management System is a component of a much more complex fast acting Energy Management System and must interface with other on board systems such as engine management, climate controls, communications and safety systems.
There are thus many varieties of BMS.
In order to control battery performance and safety it is necessary to understand what needs to be controlled and why it needs controlling. This requires an in depth understanding of the fundamental cell chemistries, performance characteristics and battery failure modes particularly Lithium battery failures. The battery can not simply be treated as a black box.
There are three main objectives common to all Battery Management Systems
To achieve these objectives the BMS may incorporate one or more of the following functions. (Follow the links to see how these functions are implemented.)
The following examples illustrate three very different applications of BMS in action.
The life of rechargeable NiCad and Nickel Metal Hydride batteries such as those used in power tools can be extended by the use of an intelligent charging system which facilitates communications between the battery and the charger. The battery provides information about its specification, its current condition and its usage history which is used by the charger to determine the optimum charging profile or, by the application in which it is used, to control its usage.
The prime objective of the charger/battery combination is to permit the incorporation of a wider range of Protection Circuits which prevent overcharging of, or damage to, the battery and thus extend its life. Charge control can be in either the battery or the charger. The objective of the application/battery combination is to prevent overloads and to conserve the battery. Similar to the charger combination, discharge control can be in either the application or in the battery.
Although some special cells incorporating intelligence have been developed, the intelligence is more likely to be implemented in a battery pack.
The system works as follows:
The Intelligent Battery, or Smart Battery, provides outputs from sensors which give the actual status of voltages, currents and temperatures within the battery as well as the state of charge. It can also provide alarm functions indicating out of tolerance conditions.
The Intelligent Battery also contains a memory chip which is programmed by the manufacturer with information about the battery specification such as:-
Once the battery is placed into use, the memory may also record :-
The system also requires devices which may be in either the battery or the charger or both which can interrupt or modify the charging according to a set of rules. Similarly, battery discharge can be controlled by the battery or demand management circuits in the application.
The Intelligent Battery also needs an Intelligent Charger it can talk to and a language they can speak.
The charger is programmed to respond to inputs from the battery, to optimise the charging profile, charging at the maximum rate until a preset temperature is reached, then slowing down or stopping the charge and or switching on a cooling fan so as not to exceed the temperature limit and thus avoid permanent damage to the battery. If a deterioration in the battery internal impedance indicates that reconditioning is necessary the charger can also be programmed to reform the battery by subjecting it to several deep charge, discharge cycles. Because the battery contains information about its specification which can be read by the charger, it is possible to build Universal Chargers which can automatically adapt the charging profile to a range of battery chemistries and capacities, so long as they comply with an agreed message protocol.
A separate communications channel is needed to facilitate interactions between the battery and the charger. One example used for simple applications is the System Management Bus ( SMBus) which forms part of the Smart Battery System which is used mainly in low power applications. Batteries which comply with the SBS standard are called Smart Batteries. Intelligent batteries are however not limited to the SMS scheme and many manufacturers have implemented their own proprietary schemes which may be simpler or more complex, depending on the requirements of the application.
A 50% increase in battery life has been claimed by using such techniques.
Automatic Control System
This is an example of an Automatic Control System in which the battery provides information about its actual condition to the charger which compares the actual condition with the desired condition and generates an error signal which is used to initiate control actions to bring the actual condition into line with the desired condition. The control signals form part of a Feedback Loop which provides automatic compensation to keep the battery within its desired operating parameters. It does not require any user intervention. Some form of automatic control system is an essential part of all BMS
Battery Monitoring
As well as talking to the charger, the Intelligent Battery can also talk to the user or to other systems of which the battery may be a part. The signals it provides can be used to turn on warning lights or to inform the user about the condition of the battery and how much charge it has left.
Monitoring the battery condition is an essential part of all Battery Management Systems. In the first of the following two examples, the control actions are manual, - the power plant maintenance engineer fixes any deficiencies. In the second example the battery is part of an Automatic Control System made up from several interlinked feedback loops controlling the battery itself and its role as part of the overall vehicle energy management system.
The battery management requirements are quite different for standby and emergency power installations. Batteries may be inactive for long periods topped up by a trickle charge from time to time, or as in telecommunications installations they may be kept on float charge to keep them fully charged at all times. By their nature, such installations must be available for use at all times. An essential responsibility of managing such installations is to know the status of the battery and whether it can be relied upon to support its load during an outage. For this it is vital to know the SOH and the SOC of the battery. In the case of lead acid batteries the SOC of individual cells can be determined by using a hydrometer to measure the specific gravity of the electrolyte in the cells. Traditionally, the only way of determining the SOH was by discharge testing, that is, by completely discharging the battery and measuring its output. Such testing is very inconvenient. For a large installation it could take eight hours to discharge the battery and another three days to recharge it. During this time the installation would be without emergency power unless a back up battery was provided.
The modern way to measure the SOH of a battery is by impedance testing or by conductance testing . It has been found that a cell's impedance has an inverse correlation with the SOC and the conductance being the reciprocal of the impedance has a direct correlation with the SOH of the cell. Both of these tests can be carried out without discharging the battery, but better still the monitoring device can remain in place providing a permanent on line measurement. This allows the plant engineer to have an up to date assessment of the battery condition so that any deterioration in cell performance can be detected and appropriate maintenance actions can be planned.
Automotive battery management is much more demanding than the previous two examples. It has to interface with a number of other on board systems, it has to work in real time in rapidly changing charging and discharging conditions
as the vehicle accelerates and brakes, and it has to work in a harsh and uncontrolled environment. This example describes a complex system as an illustration of what is possible, however not all applications will require all the functions shown here.
The functions of a BMS suitable for a hybrid electric vehicle are as follows:
In practical systems the BMS can thus incorporate more vehicle functions than simply managing the battery. It can determine the vehicle's desired operating mode, whether it is accelerating, braking, idling or stopped, and implement the associated electrical power management actions.
Cell Protection
One of the prime functions of the Battery Management System is to provide the necessary monitoring and control to protect the cells from out of tolerance ambient or operating conditions. This is of particular importance in automotive applications because of the harsh working environment. As well as individual cell protection the automotive system must be designed to respond to external fault conditions by isolating the battery as well as addressing the cause of the fault. For example cooling fans can be turned on if the battery overheats. If the overheating becomes excessive then the battery can be disconnected.
Protection methods are discussed in detail in the section on Protection.
Determining the State of Charge (SOC) of the battery is the second major function of the BMS. The SOC is needed not just for providing the Fuel Gauge indication. The BMS monitors and calculates the SOC of each individual cell in the battery to check for uniform charge in all of the cells in order to verify that individual cells do not become overstressed.
The SOC indication is also used to determine the end of the charging and discharging cycles. Over-charging and over-discharging are two of the prime causes of battery failure and the BMS must maintain the cells within the desired DOD operating limits.
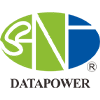
Hybrid vehicle batteries require both high power charge capabilities for regenerative braking and high power discharge capabilities for launch assist or boost. For this reason, their batteries must be maintained at a SOC that can discharge the required power but still have enough headroom to accept the necessary regenerative power without risking overcharging the cells. To fully charge the HEV battery for cell balancing (See below) would diminish charge acceptance capability for regenerative braking and hence braking efficiency. The lower limit is set to optimise fuel economy and also to prevent over discharge which could shorten the life of the battery. Accurate SOC information is therefore needed for HEVs to keep the battery operating within the required, safe limits.
HEV Battery Operating Range

Methods of determining the SOC are described in the section on State of Charge.
The Battery Management System (BMS)
BMS Scope and Failure Consequences
The diagram below indicates the possible cell failure mechanisms, their consequences and the necessary actions to be taken by the Battery Management System
Cell Failures, Consequences and Protection Mechanisms
The BMS has to protect the battery and the user under all of these conditions
The BMS is part of a multi level safety system with the following objectives and safeguards
BMS Implementation
The following diagram is a conceptual representation of the primary BMS functions. It shows the three main BMS building blocks, the Battery Monitoring Unit (BMU), the Battery Control Unit (BCU) and the CAN bus vehicle communications network and how they interface with the rest of the vehicle energy management systems. Other configurations are possible with distributed BMS embedded in the battery cell to cell interconnections.
In practice the BMS may also be coupled to other vehicle systems which communicate with the BMS via the CAN bus (see below) such as the Thermal Management System or to anti theft devices which disable the battery. There may also be requirements for system monitoring and programming, and data logging using an RS232 serial bus.
Battery Monitoring Unit
The Battery Monitoring Unit is a microprocessor based unit incorporating three functions or sub-modules. These sub-modules are not necessarily separate physical units but are shown separately here for clarity.
Battery Model
The Battery Model characterises in a software algorithm, the behaviour of the battery in response to various external and internal conditions. The model can then use these inputs to estimate the status of the battery at any instant in time.
An essential function of the battery model is to calculate the SOC of the battery for the functions noted above.
The SOC is determined essentially by integrating the current flow over time, modified to take account of the many factors which affect the performance of the cells, then subtracting the result from the known capacity of the fully charged battery. This is described in detail in the section on SOC.
The battery model can be used to log past history for maintenance purposes or to predict how many miles the vehicle may run before the battery needs recharging. The remaining range, based on recent driving or usage patterns, is calculated from the current SOC and the energy consumed and the miles covered since the previous charge (or alternatively from a previous long term average). The distance travelled is derived from data provided by other sensors on the CAN bus (see below).
The accuracy of the range calculation is more important for EVs whose only source of power is the battery. HEVs and bicycles have an alternative "Get you home" source of power should the battery become completely discharged.
The problem of losing all power when a single cell fails can be mitigated at the cost of adding four more expensive contactors which effectively split the battery into two separate units. If a cell should fail, the contactors can isolate and bypass the half of the battery containing the failed cell allowing the vehicle to limp home at half power using the other (good) half of the battery.
Outputs from the model are sent to the vehicle displays also using the CAN bus.
To reduce costs, instead of monitoring each cell in parallel, the Battery Monitoring Unit incorporates a multiplexing architecture which switches the voltage from each cell (input pairs) in turn to a single analogue or digital output line (see below). Cost savings can be realized by reducing the number of analogue control and/or digital sampling circuits and hence the component count to a minimum. The drawbacks are that only one cell voltage can be monitored at a time. A high speed switching mechanism is required to switch the output line to each cell so that all cells can be monitored sequentially.

The BMU also provides the inputs for estimating the SOH of the battery, however since the SOH changes only gradually over the lifetime of the battery, less frequent samples are needed. Depending on the method used to determine the SOH, sampling intervals may be as low as once per day. Impedance measurements for example could even be taken only in periods when the vehicle is not in use. Cycle counting of course can only occur when the vehicle is operational.
Demand or Personality Module
The Demand Module is similar in some respects to the Battery Model in that it contains a reference model with all the tolerances and limits relevant to the various parameters monitored by the Battery Model. The Demand Module also takes instructions from the communications bus such as commands from the BMS to accept a regenerative braking charge or from other vehicle sensors such as safety devices or directly from the vehicle operator. This unit is also used to set and to monitor the vehicle operating mode parameters.
This module is sometimes called the Personality Module since includes provision for programming into the system, all the custom requirements which may be specific to the customer's application. For example, the cell maker will recommend a temperature limit at which for safety reasons the battery must be automatically disconnected. However the car manufacturer may set two lower limits, one at which forced cooling may be switched on and another which lights up a warning light on the driver's instrument panel.
For HEV applications, the Personality Module interfaces with the engine Electronic Control Unit (ECU) via the CAN bus. Provision is made in this module for setting the desired system SOC operating range and the parameters for controlling the power sharing between the electric drive and the internal combustion engine .
The Demand Module also contains a memory block for holding all the reference data and for accumulating the historical data used for monitoring the battery SOH. Data to display the SOH or switch on warning lights can be provided to the vehicle instrumentation module via the CAN bus.
The outputs from the Demand Module provide the reference points for setting the operating conditions of the battery or triggering the action of protection circuits.
Test access to the BMS for monitoring or setting system parameters and for downloading the battery history is provided through a standard RS 232 or RS485 serial bus.
Decision Logic Module
The Decision Logic module compares the status of the measured or calculated battery parameters from the Battery Model with the desired or reference result from the Demand Module. Logic circuits then provide error messages to initiate cell protection actions or to be used in the various BMS feedback loops which drive the system to its desired operating point or isolate the battery in the case of unsafe conditions. These error messages provide the input signals for the Battery Control Unit.
The BMS needs a communications channel for passing signals between its various internal functional circuit blocks. It must also interface with several external vehicle systems for monitoring or controlling remote sensors, actuators, displays, safety interlocks and other functions.
Automotive BMS therefore uses the CAN bus which was designed for this purpose as its main communications channel.
The system should also include provision for standard automotive On Board Diagnostics (OBD) with Diagnostic Trouble Codes (DTC) made available to the service engineer. This connection is important for identifying any external causes of battery failure.
Battery Control Unit
The Battery Control Unit contains all the BMS power electronics circuitry. It takes control signals from the Battery Monitoring Unit to control the battery charging process and to switch the power connections to individual cells.
Some of the possible functions of this unit are:
To provide these functions, each cell in the battery may require expensive high current switches capable of switching 200 Amps or more to provide the necessary interconnections.
In its simplest form, the BMS provides a "binary" ON/OFF response to a fault or an out of tolerance condition such as an overload, merely isolating the battery completely by opening the main contactors. Progressive or variable control can however be provided in the case of an overload by utilising the CAN Bus to call for a reduced the demand on the battery.
Cell Balancing
This is another essential function of the automotive BMS. As noted above it is required to compensate for weaknesses in individual cells which could eventually cause the failure of the complete battery. The reasons for cell balancing and how this is implemented are explained on the Cell Balancing page.
Limp Home Mode
Although batteries are designed to be trouble free for 3 or more years, there is always the possibility that the battery could be disabled by the failure of a single cell. If a cell goes open circuit, the battery is essentially dead. However the BMS is designed to monitor the status of every cell and so the location of the faulty cell will automatically be identified. It is not difficult to split the battery into two sections in series, each of which can be independently bypassed by disconnecting the section of the battery containing the faulty cell and switching a conducting link in its place. This will allow the vehicle to get to home or to the nearest refuge on half power using the good section of the battery. As well as the links the system will need two more expensive high power contactors to implement this function, but this investment may be well justified when the alternative could be a costly and dangerous breakdown on the motorway.
System Enhancements
Automotive BMSs may also be required to provide various functions which are not necessarily essential to managing the battery. These may include remote monitoring of the battery from the fleet headquarters and this may also include the GPS location of the vehicle. The driver could thus be warned if the vehicle was getting low on charge or if he was straying too far from a charging station.
Fortunately not all BMS applications are as complex as this one.
There are many ways of implementing the battery management system and two different examples for a 256 Volt battery made up from 80 Lithium Iron Phosphate cells are shown below.
Master and Slaves
The master and slaves, star topology, organises the cells into blocks or modules with one slave managing each module. In the example shown, 16 X 3.2 volt cells are arranged in modules each with an output voltage of 51.2 Volts but other module sizes and voltages are possible.

This configuration has the advantages that it does not need printed circuit boards connected to individual cells and high voltage batteries can be accommodated by adding more modules and since the main battery current does not pass through slaves, it can also be used for high current batteries. Signal processing is shared between the master and the slaves simplifying the management of the information processing load. Internal communications are by means of I2C buses.
Disadvantages are that the communications between the sensors and the slaves are in analogue form, and thus susceptible to noise, and the very large number of sensor wires, four per cell, which are required. Opto-isolated connections between the slaves and the master are also required since the voltages on the slaves would otherwise be progressively higher, up to the full battery voltage, as connections are taken from further up the cell chain.
Communications with the outside world (COMS in the diagrams above and below) would typically be by means of an RS232 or more likely a USB serial connection.
BMS Daisy Chain
The daisy chain, ring topology, uses a small simple slave printed circuit board connected to each cell to accommodate the voltage and temperature sensors with an A to D converter, as well as a current bypass switch to enable cell balancing by charge shunting and an communications transceiver with built in capacitive isolation for receiving and transmitting data in digital form. The slave takes its power from the cell it is monitoring and a single RS 485 three wire data bus connects the nodes from all the slaves to the master which polls each node in turn and requests an update of its cell conditions. The slave does not carry out any signal processing, apart from the A to D conversion, as this is all carried out by the master along with all the monitoring, protection and communications functions as in the example above.
The main advantages of this topology are its simpler design and construction and its potential for higher reliability in an automotive environment.
The disadvantages are the large number of mini-slave printed circuit boards which are needed and the difficulty of mounting them on some cell types. In addition the master has a higher processing load.

Factory price rechargeable battery 3.7V DTP 654065 lipo battery 2000mAh polymer battery
Factory price rechargeable battery 3.7V DTP 654065 lipo battery 2000mAh polymer battery Model:654065 Voltage:3.7v Capacity:2000mah
Factory Wholesale Price 3.7v Lithium Polymer Battery 702050 600mAh Rechargeable Battery For Speakers
Factory Wholesale Price 3.7v Lithium Polymer Battery 702050 600mAh Rechargeable Battery For Speakers Model:702050 Voltage:3.7v Capacity:600mah
Factory OEM ODM 502040 Lithium Ion Polymer Battery Lipo Rechargeable Battery 3.7v 350mAh For Speaker
Factory OEM ODM 502040 Lithium Ion Polymer Battery Lipo Rechargeable Battery 3.7v 350mAh For Speaker Model:502040 Voltage:3.7v Capacity:350mah
Customized lipo battery 602030 3.7V 300mAh rechargeable battery
Customized lipo battery 602030 3.7V 300mAh rechargeable battery Model:602030 Voltage:3.7v Capacity:300mah
Deep Cycle Life Rechargeable 5000mAh 3.7v 6060100 6560100 Li Polymer Battery Lipo Battery
Deep Cycle Life Rechargeable 5000mAh 3.7v 6060100 6560100 Li Polymer Battery Lipo Battery Model:6060100/6560100 Voltage:3.7v Capacity:5000mah
